论文链接:https://arxiv.org/abs/1506.02640
Abstract
- 以前都是用 Classifiers 来做 detection
- 现在:we frame object detection as a regression problem to spatially separated bounding boxes and associated class probabilities
- end-to-end
- FAST!
- Fast YOLO: 155 fps, double mAP of other real-time detectors
- YOLO: 45 fps
Introduction
- Related works
- Deformable Parts Models (DPM): sliding window approach where the classifier is run at evenly spaced locations over the entire image
- R-CNN:
- first generate potential bounding boxes in an image
- then run a classifier on these proposed boxes
- post-processing: refine the bounding boxes, eliminate duplicate detections, and rescore the boxes based on other objects in the scene
- YOLO
- Fast, realtime
- simple architecture
- see the entire image => less background error
- learn generalizable representations of objects
- accuracy 不行, 虽然识别率高,但是定位精准度相对低
Architecture

Unified Detection
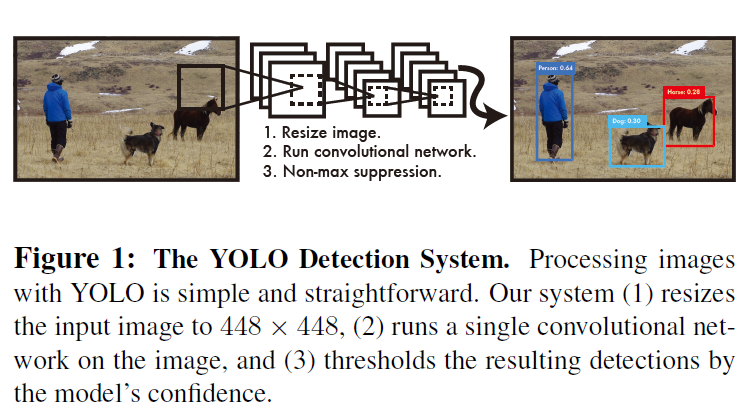
描述大致的识别思路。
- 先划分成 $S\times S$ 方格,每个方格需要检测是否有物体的中心在这个方格内,产生 $B$ 个 bounding box
- 每个 bounding box 会产生五个预测量 $x, y, w, h, \text{confidence}$。注意:$x,y$ 是相对于 cell 的,$w, h$ 是相对于整个图像的。
- confidence 描述这个区域有物体的置信度。confidence 的定义:
$$
P(\text{Object}) \times \text{IoU}_{\text{pred}}^{\text{truth}}
$$ - 每个方格产生一个还会对 $C$ 个类别判断的概率,判断这个方格内是否含有类别 $C_i$
$$
P(\text{Class}_i \mid \text{Object})
$$ - 测试的时候每个 bounding box 的置信概率就是
$$
P(\text{Class}_i \mid \text{Object}) \times P(\text{Object}) \times \text{IoU}_{\text{pred}}^{\text{truth}} = P(\text{Class}_i) \times \text{IoU}_{\text{pred}}^{\text{truth}}
$$
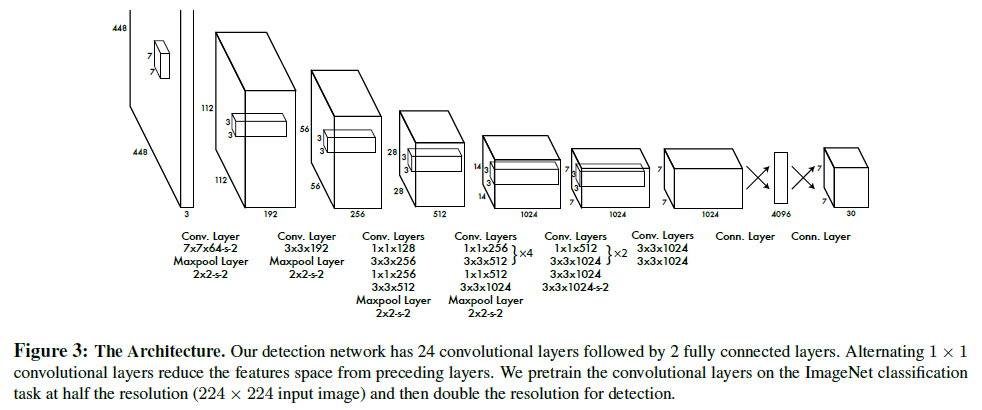
Network Design
我们取 $B=2$,每个区域生成两个 bounding box,区域数量(边) $S=7$,然后分类的类别是 $C=10$。所以最后的输出
$$
S \times S \times (5B + C) = 7 \times 7 \times 30
$$
Training
- Pretrain
- ImageNet 数据集
- 前 20 个卷积层(去掉最后四个卷积层和两个全连接层)再加上一个平均池化层和一个全连接层
- Activation
- 出最后一个层外,使用 Leaky ReLU
$$
\phi(x) = \begin{cases}
x & x > 0 \\ 0.1x & \text{otherwise}
\end{cases}
$$ - 最后一层文章中说用的是 linear activation function
- 除此之外,因为最后的结果应该在 $[0,1]$ 范围之内,查到一个 stackoverflow 的问题说最后可能对 output 逐元素做了 sigmoid. https://stackoverflow.com/questions/49707542/yolo-v1-bounding-boxes-during-training-step
- 出最后一个层外,使用 Leaky ReLU
- Hyper Parameters
- $\text{batch size} = 64$
- $\text{weight decay} = 0.0005$
- $\text{momentum} = 0.9$
- learning rate
- $10^{-3} \rightarrow 10^{-2}$ for some epochs
- $10^{-2}$ for $75$ epochs
- $10^{-3}$ for $30$ epochs
- $10^{-4}$ for $30$ epochs
- Regularization
- Dropout (0.5) after the first connected layers
Loss Function
问题一:均方差损失函数对所有东西的权重都相同
如果一个区域不含东西,那么根据定义 confidence 直接降到 0,但是这就会造成梯度的急剧抖动。同时,现在不管是对位置的预测还是对概率的置信,所有权重都是相同的,这显然不符合目标,所有作者提出了下面两个 param:
$$
\lambda_{\text{coord}} = 5, \lambda_{\text{noobj}} = .5
$$
在算坐标预测的 loss 的时候提高权重,然后对于不含目标的划分区间降低权重。
问题二:不管 bounding box 的大小,权重都一样
解决方案:计算 $w, h$ 方根的均方损失
问题三
YOLO 对于每个区域都会产生若干个 bounding box,但是训练的时候我们只希望每个目标对应一个 bounding box。所以最后计算 loss 的时候,我们就会 assign 一个 bounding box predictor 给每个目标。这个 assign 的依据是取
$$
\operatorname{argmax}_{i, B_i \in B} \text{IoU}_{\text{truth}}^{B_i}
$$
Loss
原文好像 sigma 的下标有点问题,这里做一下修正
$$
\begin{aligned}
&\lambda_{\textbf{coord}} \sum_{i=1} ^ {S^2} \sum_{j=1}^{B} 1 _{ij}^{\text{obj}} \left[(x_i - \hat{x_i})^2 + (y_i - \hat{y_i})^2\right] \\
+&\lambda_{\textbf{coord}} \sum_{i=1} ^ {S^2} \sum_{j=1}^{B} 1 _{ij}^{\text{obj}} \left[ \left(\sqrt{w_i} - \sqrt{\hat{w_i}}\right)^2 + \left(\sqrt{h_i} - \sqrt{\hat{h_i}}\right)^2 \right] \\
+&\sum_{i=1} ^ {S^2} \sum_{j=1}^{B} 1 _{ij}^{\text{obj}}\left(C_i - \hat{C_i}\right)^2 \\
+&\lambda_{\textbf{noobj}}\sum_{i=1} ^ {S^2} \sum_{j=1}^{B} 1 _{ij}^{\text{noobj}}\left(C_i - \hat{C_i}\right)^2 \\
+&\sum_{i=1}^{S^2} 1_{i}^{\text{obj}} \sum_{c\in\text{classes}} (p_i(c) - \hat{p_i}(c))^2
\end{aligned}
$$
where $1^{\text{obj}} _i$ denotes if object appears in cell $i$, and $1^{\text{obj}}_{ij}$ denotes that the $j$th bounding box predictor in cell $i$ is “responsible” for that prediction.
从上到下看还挺好理解的。
实践中的问题
对于每一个 cell,如果有多个东西就无解了,因为 loss 中没有说明这种情况。
一些想法
总的来说,Yolo v1 apply 了大量的 tricks... 太难训了。我自己训比原文低了 15 个点左右 ... 虽然用的是 resnet18/50。
1 条评论
华纳公司官方开户渠道?(183-8890-9465)-薇-STS5099【6011643】
如何通过官方渠道申请华纳公司账户?(183-8890-9465)-薇-STS5099【6011643】
华纳总公司官方开户指南?(183-8890-9465)-薇-STS5099【6011643】
华纳公司官方开户所需材料?(183-8890-9465)-薇-STS5099【6011643】
华纳官方开户流程?(183-8890-9465)-薇-STS5099【6011643】
华纳公司官方开户申请步骤?(183-8890-9465)-薇-STS5099【6011643】
华纳官方开户指南?(183-8890-9465)-薇-STS5099【6011643】
华纳总公司官方开户?(183-8890-9465)-薇-STS5099【6011643】
华纳公司官方开户所需材料?(183-8890-9465)-薇-STS5099【6011643】
华纳官方开户申请流程?(183-8890-9465)-薇-STS5099【6011643】